群友們好!
本文是無線測距系統系列的下篇。而發表於 2024 年的 👉🏻上篇 由於論述過於寬泛和挖坑不填等原因,已經遭到了群友的批鬥 😅 更有甚者,要在我的評論區直接代替我進行續寫……我真的謝謝妳啊!!
爲了不辜負群友們的好奇心,我必須儘快嚴肅認真完成這一系列!
Contents
序:無線測距技術的普及
「嘀嘀嘀嘀嘀,嘀嘀嘀……]
蘋果用戶又™️在玩弄 AirTag 了!💢 安卓用戶不甘地想道。
AirTag 是 Apple 的明星產品,衆所周知的是,他們早已將超寬帶 (UWB) 測距技術玩得爐火純青。藉助遍佈世界各地的 Apple 設備,AirTag 不僅實現了遠程離線定位,而且任意一臺 iPhone 都能通過 UWB 信號來精確測量其位置和距離。Apple 一套軟硬件結合的拳法下來,安卓用戶們漏出了一聲最後的低吟「好強的生態影響力……」然後駕鶴西去。
現在反觀安卓陣營,據我所知,能勉強和 AirTag 扳一下手腕的追蹤器產品大概就只有三星的 SmartTag。它使用和 AirTag 非常相似的方案,依靠遍佈各地的三星手機和硬件 UWB 分別實現遠程定位和近距離測距。
這時候可能就有群友要問了:妳根本就沒把 Google Find Hub 放在眼裏!!!等我們谷爹一發力,以他的號召力,聯合全球安卓廠商,建立一個全球性的尋物網路豈不是輕而易舉??——啊對對對,妳說得非常好!尋物網路真要建,直接給全球手機的 Play 服務發個更新就完事了。聽起來很美好,然而,這個願景卻有一個巨大的缺失——UWB。
沒有 UWB,精確的近距離測距就難以實現,而由於 UWB 和一般手機通信的工作頻譜完全不同,它需要一套專門的硬件。財大氣粗的 Apple 廚子一句話就能給每一臺 iPhone 塞進 UWB 功能。而安卓陣營這邊?就算谷爹有三頭六臂,面對那些油鹽不進,我行我素,爾虞我詐,偷工減料的安卓廠商,他也沒有給每一臺安卓手機強行塞 UWB 的能力。
對於大多數安卓廠商而言,引入新硬件的阻力極大,所以最好的方案就使用已有的硬件來實現新功能。2024 年底,藍牙 6.0 標準發佈。這套標準無疑給安卓版無線測距帶去了一線生機。不過在談論藍牙 6.0 到底搞了甚麼黑科技之前,請容我先談論一下雷達系統和 UWB,帶各位體會一下它們大相徑庭的技術路線。
方案一:電老虎雷達
說到測距就不能不說雷達,雷達的測距原理就是測量信號在物體上反彈帶來的時間差,簡單粗暴,容易理解;而其毛病也很簡單,太大了,太費電了。
雖然我不是很董軍事裝備,但是這大概是我能在網上找到的最小的雷達 (KLJ-7A),用來搭載在戰鬥機上面的。

就算是這麼一個小東西,如果要供電,按保守中的保守估計的話,俺覺得也要一個外接充電寶。
啊,我指的不是妳的手機充電寶,而是這種:

那爲什麼普通的雷達會這麼費電呢?這是因爲雷達依賴於目標物體來被動反射信號,根據雷達方程:
其中左邊 是接收功率,右邊 是發射功率, 是與目標的距離, 是目標的截面积, 是接收天線的有效面積。
可見,如果完全依賴目標物的反射電磁波來探測,那麼雷達的接收功率會和距離的 4 次方成反比,所以當距離增加的時候,接收功率會迅速下降。爲了能接收微弱的反射電磁波,雷達必須增加輸出功率來彌補途中功率的損失。此外,接收功率還會受物體反射面積和天線面積影響,爲了能探測到小物體,雷達必須配備一個大型天線。
但是好在俺們沒必要把雷達塞進手機。因爲 AirTag 的測距不依賴於被動地反射電磁波,AirTag 會主動向 iPhone 發射信號,它還可以在接收到手機的信號之後,立刻返回一個信號,這樣 iPhone 就可以根據信號在空中飛行的時間 (ToF) 來計算距離了。
(距離 = 光速 * 信號飛行時間)
和雷達不同,手機上的測距系統不依賴目標物體被動反射電磁波,俺們也就脫離了無腦的輸出功率遊戲。下面就讓我們進入純粹優美的數學遊戲……
方案二:UWB 信號的物理學
這時候可能就有群友要問了:既然要探測的東西很近,還會主動發射信號,那爲什麼不直接用 Wi-Fi 或者藍牙來進行飛行時間 (ToF) 測距呢?
妳問得非常好!但是爲了回答妳,我先要去複習一下《通信原理》的課本,,,😅
我複習完了。讓我和妳進行一些微小的計算,以便對信號的飛行時間產生概念。
假設被測的距離是 15 米,並且要求精度要達到 15cm 以內,而電波以光速傳播,那麼俺們可以計算信號來回的時間是:
此外,該系統要分辨出 15cm 的距離差,那麼該系統能分辨出的最小時間間隔必須小於:
根據這個算式,俺們能夠計算出最小時間分辨間隔(誤差)和測距精度之間的關係,如下表所示。
表 1:時間誤差和測距誤差之間的關係
| 時間測量誤差 | 測距系統的最佳距離誤差 |
|---|---|
| 1 ns | 15 cm |
| 10 ns | 1.5 m |
| 100 ns | 15 m |
| 1 μs | 150 m |
| 10 μs | 1.5 km |
那麼,這個時間測量誤差是由甚麼決定的呢?我們已經知道,計算 ToF 需要知道信號的發送時間和返回的到達時間。發送時間很好確定,發送端打開接收機的同時開始計時就行了。問題是如何精確測量返回信號的到達時間。
工程師們會自然而然地想到:當天線上檢測到一個脈衝信號的時候,記錄到達的瞬間的時間,問題不就解決了?不過,爲了降低時間測量誤差,提高檢測的精度,這個脈衝信號必須要邊緣銳利,形狀明顯。看上去,一個方波信號是最佳的選擇。
讓我先火速產生一個持續時間爲 1ns、方方正正的方波信號——
500 GSa/s
左圖是脈衝的波形,電路一旦檢測到這個陡峭的上升沿就會記錄其到達時間。右邊是其頻譜,頻譜中間的 0 是低頻分量,往兩邊走是高頻分量。相信玩過信號處理的群友們已經開始會心一笑了,但是如果妳笑容逐漸消失也沒有關係 🥶 妳只需要知道頻譜資源有限,不可無限佔用就行了,然而這個信號似乎快佔滿了 0 ~ 10 GHz 的所有頻段。
試試調整脈衝的寬度,看看對頻譜有什麼影響。
爲了方便測量,俺們希望這個脈衝越方越好、越短越好,可是越短的脈衝信號佔用的頻譜就越寬。此外,即使放寬脈衝的寬度,其頻譜向高頻的衰減也是比較緩慢的,這種信號要是真放出來,就會對週圍無辜的設備造成干擾,這是現實世界所不允許的。俺們想要的是,信號的頻譜只在批准的範圍內存在,一旦超出批准的頻段,就立馬衰減到 0,這是墜吼的。
假設現在我們最多允許向這個脈衝信號分配 1 GHz 的帶寬,超出範圍的部分要清零。之後,還要把他搬運到 Wi-Fi 使用的 6 GHz 頻段才能發射出去。
爲了實現這些目標,俺們需要一條流水線來處理這些脈衝,如下所示:
%3btext-align:center%3b%7d%23mermaid-chart-0 .edgeLabel p%7bbackground-color:rgba(232%2c232%2c232%2c 0.8)%3b%7d%23mermaid-chart-0 .edgeLabel rect%7bopacity:0.5%3bbackground-color:rgba(232%2c232%2c232%2c 0.8)%3bfill:rgba(232%2c232%2c232%2c 0.8)%3b%7d%23mermaid-chart-0 .labelBkg%7bbackground-color:rgba(232%2c 232%2c 232%2c 0.5)%3b%7d%23mermaid-chart-0 .cluster rect%7bfill:%23ffffde%3bstroke:%23aaaa33%3bstroke-width:1px%3b%7d%23mermaid-chart-0 .cluster text%7bfill:%23333%3b%7d%23mermaid-chart-0 .cluster span%7bcolor:%23333%3b%7d%23mermaid-chart-0 div.mermaidTooltip%7bposition:absolute%3btext-align:center%3bmax-width:200px%3bpadding:2px%3bfont-family:arial%2csans-serif%3bfont-size:12px%3bbackground:hsl(80%2c 100%25%2c 96.2745098039%25)%3bborder:1px solid %23aaaa33%3bborder-radius:2px%3bpointer-events:none%3bz-index:100%3b%7d%23mermaid-chart-0 .flowchartTitleText%7btext-anchor:middle%3bfont-size:18px%3bfill:%23333%3b%7d%23mermaid-chart-0 rect.text%7bfill:none%3bstroke-width:0%3b%7d%23mermaid-chart-0 .icon-shape%2c%23mermaid-chart-0 .image-shape%7bbackground-color:rgba(232%2c232%2c232%2c 0.8)%3btext-align:center%3b%7d%23mermaid-chart-0 .icon-shape p%2c%23mermaid-chart-0 .image-shape p%7bbackground-color:rgba(232%2c232%2c232%2c 0.8)%3bpadding:2px%3b%7d%23mermaid-chart-0 .icon-shape .label rect%2c%23mermaid-chart-0 .image-shape .label rect%7bopacity:0.5%3bbackground-color:rgba(232%2c232%2c232%2c 0.8)%3bfill:rgba(232%2c232%2c232%2c 0.8)%3b%7d%23mermaid-chart-0 .label-icon%7bdisplay:inline-block%3bheight:1em%3boverflow:visible%3bvertical-align:-0.125em%3b%7d%23mermaid-chart-0 .node .label-icon path%7bfill:currentColor%3bstroke:revert%3bstroke-width:revert%3b%7d%23mermaid-chart-0 :root%7b--mermaid-font-family:arial%2csans-serif%3b%7d%3c/style%3e%3cg%3e%3cmarker id='mermaid-chart-0_flowchart-v2-pointEnd' class='marker flowchart-v2' viewBox='0 0 10 10' refX='5' refY='5' markerUnits='userSpaceOnUse' markerWidth='8' markerHeight='8' orient='auto'%3e%3cpath d='M 0 0 L 10 5 L 0 10 z' class='arrowMarkerPath' style='stroke-width: 1%3b stroke-dasharray: 1%2c 0%3b'/%3e%3c/marker%3e%3cmarker id='mermaid-chart-0_flowchart-v2-pointStart' class='marker flowchart-v2' viewBox='0 0 10 10' refX='4.5' refY='5' markerUnits='userSpaceOnUse' markerWidth='8' markerHeight='8' orient='auto'%3e%3cpath d='M 0 5 L 10 10 L 10 0 z' class='arrowMarkerPath' style='stroke-width: 1%3b stroke-dasharray: 1%2c 0%3b'/%3e%3c/marker%3e%3cmarker id='mermaid-chart-0_flowchart-v2-circleEnd' class='marker flowchart-v2' viewBox='0 0 10 10' refX='11' refY='5' markerUnits='userSpaceOnUse' markerWidth='11' markerHeight='11' orient='auto'%3e%3ccircle cx='5' cy='5' r='5' class='arrowMarkerPath' style='stroke-width: 1%3b stroke-dasharray: 1%2c 0%3b'/%3e%3c/marker%3e%3cmarker id='mermaid-chart-0_flowchart-v2-circleStart' class='marker flowchart-v2' viewBox='0 0 10 10' refX='-1' refY='5' markerUnits='userSpaceOnUse' markerWidth='11' markerHeight='11' orient='auto'%3e%3ccircle cx='5' cy='5' r='5' class='arrowMarkerPath' style='stroke-width: 1%3b stroke-dasharray: 1%2c 0%3b'/%3e%3c/marker%3e%3cmarker id='mermaid-chart-0_flowchart-v2-crossEnd' class='marker cross flowchart-v2' viewBox='0 0 11 11' refX='12' refY='5.2' markerUnits='userSpaceOnUse' markerWidth='11' markerHeight='11' orient='auto'%3e%3cpath d='M 1%2c1 l 9%2c9 M 10%2c1 l -9%2c9' class='arrowMarkerPath' style='stroke-width: 2%3b stroke-dasharray: 1%2c 0%3b'/%3e%3c/marker%3e%3cmarker id='mermaid-chart-0_flowchart-v2-crossStart' class='marker cross flowchart-v2' viewBox='0 0 11 11' refX='-1' refY='5.2' markerUnits='userSpaceOnUse' markerWidth='11' markerHeight='11' orient='auto'%3e%3cpath d='M 1%2c1 l 9%2c9 M 10%2c1 l -9%2c9' class='arrowMarkerPath' style='stroke-width: 2%3b stroke-dasharray: 1%2c 0%3b'/%3e%3c/marker%3e%3cg class='root'%3e%3cg class='clusters'%3e%3cg class='cluster' id='RF_Frontend' data-look='classic'%3e%3crect style='' x='276.265625' y='161' width='316.921875' height='513.15625'/%3e%3cg class='cluster-label' transform='translate(389.8203125%2c 161)'%3e%3cforeignObject width='89.8125' height='24'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b'%3e%3cspan class='nodeLabel'%3e%3cp%3eRF Frontend%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='cluster' id='Baseband' data-look='classic'%3e%3crect style='' x='8' y='8' width='248.265625' height='281'/%3e%3cg class='cluster-label' transform='translate(67.1953125%2c 8)'%3e%3cforeignObject width='129.875' height='24'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b'%3e%3cspan class='nodeLabel'%3e%3cp%3eBaseband Section%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3c/g%3e%3cg class='edgePaths'%3e%3cpath d='M132.133%2c111L132.133%2c115.167C132.133%2c119.333%2c132.133%2c127.667%2c132.133%2c136C132.133%2c144.333%2c132.133%2c152.667%2c132.133%2c160.333C132.133%2c168%2c132.133%2c175%2c132.133%2c178.5L132.133%2c182' id='e1' class='edge-thickness-normal edge-pattern-solid edge-thickness-normal edge-pattern-solid flowchart-link edge-animation-fast' style='%3b' data-edge='true' data-et='edge' data-id='e1' data-points='W3sieCI6MTMyLjEzMjgxMjUsInkiOjExMX0seyJ4IjoxMzIuMTMyODEyNSwieSI6MTM2fSx7IngiOjEzMi4xMzI4MTI1LCJ5IjoxNjF9LHsieCI6MTMyLjEzMjgxMjUsInkiOjE4Nn1d' marker-end='url(%23mermaid-chart-0_flowchart-v2-pointEnd)'/%3e%3cpath d='M132.133%2c264L132.133%2c268.167C132.133%2c272.333%2c132.133%2c280.667%2c173.854%2c293C215.576%2c305.333%2c299.018%2c321.667%2c344.762%2c338.121C390.505%2c354.575%2c398.549%2c371.15%2c402.571%2c379.437L406.593%2c387.724' id='ea' class='edge-thickness-normal edge-pattern-solid edge-thickness-normal edge-pattern-solid flowchart-link edge-animation-fast' style='%3b' data-edge='true' data-et='edge' data-id='ea' data-points='W3sieCI6MTMyLjEzMjgxMjUsInkiOjI2NH0seyJ4IjoxMzIuMTMyODEyNSwieSI6Mjg5fSx7IngiOjM4Mi40NjA5Mzc1LCJ5IjozMzh9LHsieCI6NDA4LjMzOTc0OTUxMjE2NDI1LCJ5IjozOTEuMzIzMDIwNjk0OTk0MzR9XQ==' marker-end='url(%23mermaid-chart-0_flowchart-v2-pointEnd)'/%3e%3cpath d='M471.836%2c264L471.836%2c268.167C471.836%2c272.333%2c471.836%2c280.667%2c471.836%2c293C471.836%2c305.333%2c471.836%2c321.667%2c467.814%2c338.121C463.792%2c354.575%2c455.748%2c371.15%2c451.726%2c379.437L447.704%2c387.724' id='e2' class='edge-thickness-normal edge-pattern-solid edge-thickness-normal edge-pattern-solid flowchart-link edge-animation-fast' style='%3b' data-edge='true' data-et='edge' data-id='e2' data-points='W3sieCI6NDcxLjgzNTkzNzUsInkiOjI2NH0seyJ4Ijo0NzEuODM1OTM3NSwieSI6Mjg5fSx7IngiOjQ3MS44MzU5Mzc1LCJ5IjozMzh9LHsieCI6NDQ1Ljk1NzEyNTQ4NzgzNTc1LCJ5IjozOTEuMzIzMDIwNjk0OTk0MzR9XQ==' marker-end='url(%23mermaid-chart-0_flowchart-v2-pointEnd)'/%3e%3cpath d='M427.148%2c473.156L427.148%2c481.323C427.148%2c489.49%2c427.148%2c505.823%2c427.148%2c521.49C427.148%2c537.156%2c427.148%2c552.156%2c427.148%2c559.656L427.148%2c567.156' id='e3' class='edge-thickness-normal edge-pattern-solid edge-thickness-normal edge-pattern-solid flowchart-link edge-animation-fast' style='%3b' data-edge='true' data-et='edge' data-id='e3' data-points='W3sieCI6NDI3LjE0ODQzNzUsInkiOjQ3My4xNTYyNX0seyJ4Ijo0MjcuMTQ4NDM3NSwieSI6NTIyLjE1NjI1fSx7IngiOjQyNy4xNDg0Mzc1LCJ5Ijo1NzEuMTU2MjV9XQ==' marker-end='url(%23mermaid-chart-0_flowchart-v2-pointEnd)'/%3e%3cpath d='M427.148%2c649.156L427.148%2c653.323C427.148%2c657.49%2c427.148%2c665.823%2c427.148%2c674.156C427.148%2c682.49%2c427.148%2c690.823%2c427.219%2c698.573C427.289%2c706.323%2c427.429%2c713.49%2c427.5%2c717.074L427.57%2c720.657' id='e4' class='edge-thickness-normal edge-pattern-solid edge-thickness-normal edge-pattern-solid flowchart-link edge-animation-fast' style='%3b' data-edge='true' data-et='edge' data-id='e4' data-points='W3sieCI6NDI3LjE0ODQzNzUsInkiOjY0OS4xNTYyNX0seyJ4Ijo0MjcuMTQ4NDM3NSwieSI6Njc0LjE1NjI1fSx7IngiOjQyNy4xNDg0Mzc1LCJ5Ijo2OTkuMTU2MjV9LHsieCI6NDI3LjY0ODQzNzUsInkiOjcyNC42NTYyNX1d' marker-end='url(%23mermaid-chart-0_flowchart-v2-pointEnd)'/%3e%3c/g%3e%3cg class='edgeLabels'%3e%3cg class='edgeLabel'%3e%3cg class='label' data-id='e1' transform='translate(0%2c 0)'%3e%3cforeignObject width='0' height='0'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' class='labelBkg' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='edgeLabel'%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='edgeLabel' transform='translate(382.4609375%2c 338)'%3e%3cg class='label' data-id='ea' transform='translate(-69.375%2c -24)'%3e%3cforeignObject width='138.75' height='48'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' class='labelBkg' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='edgeLabel'%3e%3cp%3eBand-Limited Pulse%3cbr /%3e1%ef%b8%8f%e2%83%a3%e5%b8%b6%e9%99%90%e8%84%88%e8%a1%9d%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='edgeLabel'%3e%3cg class='label' data-id='e2' transform='translate(0%2c 0)'%3e%3cforeignObject width='0' height='0'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' class='labelBkg' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='edgeLabel'%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='edgeLabel' transform='translate(427.1484375%2c 522.15625)'%3e%3cg class='label' data-id='e3' transform='translate(-65.375%2c -24)'%3e%3cforeignObject width='130.75' height='48'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' class='labelBkg' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='edgeLabel'%3e%3cp%3eModulation Output%3cbr /%3e2%ef%b8%8f%e2%83%a3%e8%aa%bf%e8%a3%bd%e8%bc%b8%e5%87%ba%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='edgeLabel'%3e%3cg class='label' data-id='e4' transform='translate(0%2c 0)'%3e%3cforeignObject width='0' height='0'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' class='labelBkg' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='edgeLabel'%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3c/g%3e%3cg class='nodes'%3e%3cg class='node default' id='flowchart-A-0' transform='translate(132.1328125%2c 72)'%3e%3crect class='basic label-container' style='' x='-88.2578125' y='-39' width='176.515625' height='78'/%3e%3cg class='label' style='' transform='translate(-58.2578125%2c -24)'%3e%3crect/%3e%3cforeignObject width='116.515625' height='48'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='nodeLabel'%3e%3cp%3ePulse Generator%3cbr /%3e%e8%84%88%e8%a1%9d%e7%94%a2%e7%94%9f%e5%99%a8%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='node default' id='flowchart-AA-1' transform='translate(132.1328125%2c 225)'%3e%3crect class='basic label-container' style='' x='-89.1328125' y='-39' width='178.265625' height='78'/%3e%3cg class='label' style='' transform='translate(-59.1328125%2c -24)'%3e%3crect/%3e%3cforeignObject width='118.265625' height='48'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='nodeLabel'%3e%3cp%3eBand-Pass Filter%3cbr /%3e%e5%b8%b6%e9%80%9a%e6%bf%be%e6%b3%a2%e5%99%a8%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='node default' id='flowchart-B-2' transform='translate(427.1484375%2c 430.078125)'%3e%3ccircle class='basic label-container' style='fill:%23bbf !important%3bstroke:%23333 !important' r='43.078125' cx='0' cy='0'/%3e%3cg class='label' style='color:black !important' transform='translate(-35.578125%2c -24)'%3e%3crect/%3e%3cforeignObject width='71.15625' height='48'%3e%3cdiv style='color: rgb(0%2c 0%2c 0) !important%3b display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b' xmlns='http://www.w3.org/1999/xhtml'%3e%3cspan style='color:black !important' class='nodeLabel'%3e%3cp%3eModulator%3cbr /%3e%e8%aa%bf%e8%a3%bd%e5%99%a8%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='node default' id='flowchart-C-3' transform='translate(471.8359375%2c 225)'%3e%3crect class='basic label-container' style='' x='-84.6875' y='-39' width='169.375' height='78'/%3e%3cg class='label' style='' transform='translate(-54.6875%2c -24)'%3e%3crect/%3e%3cforeignObject width='109.375' height='48'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='nodeLabel'%3e%3cp%3eLocal Oscillator%3cbr /%3e6 GHz %e6%8c%af%e7%9b%aa%e5%99%a8%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='node default' id='flowchart-D-4' transform='translate(427.1484375%2c 610.15625)'%3e%3crect class='basic label-container' style='' x='-88.015625' y='-39' width='176.03125' height='78'/%3e%3cg class='label' style='' transform='translate(-58.015625%2c -24)'%3e%3crect/%3e%3cforeignObject width='116.03125' height='48'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='nodeLabel'%3e%3cp%3eAmplifier %2b Filter%3cbr /%3e%e5%8a%9f%e6%94%be %2b %e6%bf%be%e6%b3%a2%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3cg class='node default' id='flowchart-F-5' transform='translate(427.1484375%2c 773.4609375)'%3e%3cg transform='translate(-49.3046875%2c 49.3046875)'%3e%3cpath d='M0 0 C23.3401012935193 0%2c 46.6802025870386 0%2c 98.609375 0 C79.30391473697951 -38.61092052604098%2c 59.99845447395902 -77.22184105208196%2c 49.3046875 -98.609375 C31.87238142098643 -63.74476284197286%2c 14.440075341972857 -28.880150683945715%2c 0 0' stroke='none' stroke-width='0' fill='%23ECECFF' style=''/%3e%3cpath d='M0 0 C24.22397617582135 0%2c 48.4479523516427 0%2c 98.609375 0 M0 0 C21.580078121437236 0%2c 43.16015624287447 0%2c 98.609375 0 M98.609375 0 C81.9606498443724 -33.297450311255204%2c 65.3119246887448 -66.59490062251041%2c 49.3046875 -98.609375 M98.609375 0 C88.3212037979095 -20.576342404180977%2c 78.03303259581902 -41.152684808361954%2c 49.3046875 -98.609375 M49.3046875 -98.609375 C35.202093514270416 -70.40418702854083%2c 21.09949952854083 -42.19899905708166%2c 0 0 M49.3046875 -98.609375 C31.947455255139158 -63.894910510278315%2c 14.590223010278315 -29.18044602055663%2c 0 0' stroke='%239370DB' stroke-width='1.3' fill='none' stroke-dasharray='0 0' style=''/%3e%3c/g%3e%3cg class='label' style='' transform='translate(-29.8046875%2c 17.8046875)'%3e%3crect/%3e%3cforeignObject width='59.609375' height='24'%3e%3cdiv xmlns='http://www.w3.org/1999/xhtml' style='display: table-cell%3b white-space: nowrap%3b line-height: 1.5%3b max-width: 200px%3b text-align: center%3b'%3e%3cspan class='nodeLabel'%3e%3cp%3eAntenna%3c/p%3e%3c/span%3e%3c/div%3e%3c/foreignObject%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
脈衝產生之後先會經過一個帶通濾波器,消除掉 1 GHz 以上的頻率分量,記這個信號爲信號 1️⃣,待會要用示波器看。然後這個帶限脈衝被一個 6 GHz 的載波進行調製,把頻率搬到高頻,記這個高頻的輸出信號爲信號 2️⃣。
值得注意的是,對脈衝信號進行頻譜限制會導致信號變形,失去我們想要的清晰形狀。下面我使用一臺函數發生器來向妳展示信號 1️⃣ 是一個甚麼形狀。
500 GSa/s
左圖是之前的「1 ns 方波」的頻譜被低通濾波之後的結果,右圖的信號1️⃣則是被變形後的方波。可見這個方波再也不方了,變成了一個類似三角形的脈衝,並且兩邊出現了些許波紋。妳可以通過調整上面的濾波器帶寬來看看這個信號會如何變形。
值得注意的是,帶寬越寬,信號越方、越清晰;而帶寬越窄,信號越圓滑,而且兩邊波紋就越狂暴。當妳把帶寬限制在 160 MHz 以下的時候,兩邊的波紋已經儼然成爲瘋狂宇宙,原來的形狀早已消失不見。由於其邊緣不再清晰,我們將無法精確地測出它的到達時間,就像這樣:
最終導致無法進行精確的測距。
還記得上面那個對照表嗎?在無線測距中,時間測量上的差之毫釐,將是距離測量上的謬以千里。因此,只有帶寬足夠寬、形狀足夠清晰的的脈衝才能被用來精確測距。
工程上,在採樣率足夠的前提下,一個信號能提供的時間分辨率 和其帶寬 粗略具有如下關係:
根據這個關係,俺們可以把上面那個表擴充一下:
表 2:時間誤差/測距誤差/信號帶寬之間的關係
| 時間測量誤差 | 測距系統的最佳距離誤差 | 所需帶寬估算 |
|---|---|---|
| 1 ns | 15 cm | 1 GHz |
| 10 ns | 1.5 m | 100 MHz |
| 100 ns | 15 m | 10 MHz |
| 1 μs | 150 m | 1 MHz |
| 10 μs | 1.5 km | 100 kHz |
綜上,超寬帶信號所具有的波形清晰、容易測量的性質,已經使其成爲測距解決方案中的蘋果技術。它可以提供釐米級別的測量精度,就算成本較高,它也還是理所當然地得到了 AirTag 的重用,可謂是門當戶對。
出於好奇心,在結束本章之前,我還想看看在空中飄過的 UWB 信號究竟是長什麼樣的。根據上面的框圖,帶限方波信號1️⃣在和 6 GHz 載波混合之後會成爲已調信號2️⃣,這個信號會被進一步放大,然後從天線發射出去。
讓俺們把信號1️⃣和信號2️⃣擺在一起看看:
500 GSa/s
左圖是帶限方波信號,右邊則是調製後的輸出信號。妳可以調整方波輸出寬度,然後就會發現只要帶寬不變,其上升沿的陡峭程度是不會變的。換句話說,測量的精確度取決於上升沿的陡峭程度,也就取決於信號的帶寬。
俺們還可以發現,右邊那團波形的包絡具有左邊信號的形狀。這個載波雖然看上去是一個平平無奇的正弦波,但是妳要知道,它已經來到了 6 GHz 的高頻段,其週期只有轉瞬即逝的 秒。而這麼一個 UWB 脈衝也只具有區區十幾個個波峰的寬度,屬於是在空間和時間上的極限壓縮。
我希望這裏的內容能給妳一點想像的素材——當妳下次看到 AirTag 的時候,正好有一團團超級狹窄的波從妳眼前瞬間掠過,而接收機在捕捉到這個波之後,可以準確地測出它的到達時間。
幕間:使用 Wi-Fi 進行安卓測距的可能性
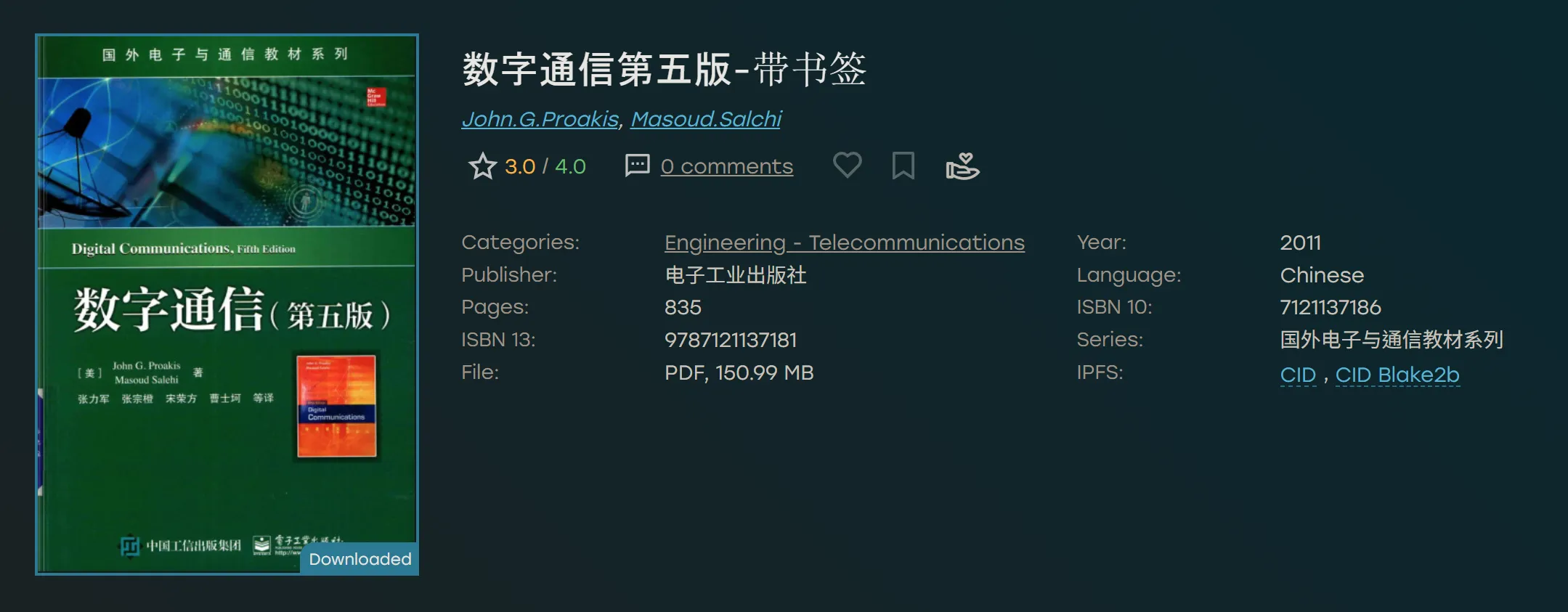
看到這邊,可能就有安卓群友想要問了:現在 Wi-Fi 的頻道帶寬動輒 160 MHz,如果可以接受一米的安卓誤差,感覺拿來測距也不難吧?——妳問得非常好!但是我很遺憾地告訴妳,現有的 Wi-Fi 硬件就不是爲了發射短脈衝而設計的,在不對硬件或者物理層進行暴力魔改的情況下,很難用來測距。讓俺們來看一眼 5 GHz 的 Wi-Fi 信號的幀格式:
如圖所示,按照 Wi-Fi 的玩法,光是發送一個 QAM 符號就需要 4 μs (4000 ns),而一個幀需要上百個符號,發送這些符號需要大量的時間。並且,長信號更容易受到多徑效應的影響,使得其邊緣更加難以測量。很明顯,這樣的信號是爲了傳輸數據而打造,而不是用來測距的。
說一句題外話,這張圖展示的僅僅是是一路信號的格式。在 160 MHz 的 Wi-Fi 中,共有 468 路這樣的信號(子載波)共同承擔傳輸任務。這些子載波中的 QAM 符號會在最後被合成一個巨大的 OFDM 符號發射出去,從而最大化吞吐量。
OFDM(正交頻分復用)是我在學習數字信號處理時最喜歡的部分。它使用了最優美的數學,通過最靈巧的方法構造信號;它還和快速傅里葉變換 (FFT) 一起,解決了曾經被視爲最無解的問題。基於 OFDM 的工程成果已經最深入地覆蓋到了世界上的每一個角落,而如果 OFDM 未曾被發明,妳手機的網速可能永遠不會比 2007 年那時的更快。
現在讓我們回到無線測距。俺們已經知道,對於 ToF 測距,一套專門的 UWB 硬件和協議是必不可少的。可是光是「安裝新硬件」這個門檻,就能勸退大部分降本增笑的安卓廠商,無線測距的普及似乎成爲了遙不可及的夢想。
方案三:安卓用戶的幸福時刻
1. 藍牙 6.0 標準的推出
AirTag 第一代於 2021 年發佈,而 iPhone 首次對 UWB 的支持卻出現在了 2019 年的 iPhone 11 上。可見在 AirTag 推出前,Apple 就已經提前爲 UWB 技術鋪好了道路。在 AirTag 推出的那一刻,人們驚奇地發現這玩意居然是無需折騰、開箱即用的,彷彿一切都已經在暗中安排好了。
一時間,人們被震撼親媽,對這個充滿了魔力的小玩具交口稱讚。評測視頻也是鋪天蓋地而來,我還記得那時一晚上就看了三條不同的評測視頻。

最令我震撼的部分莫過於 iPhone 可以實時地,精確地,同時測量 AirTag 的距離和方向。如果說 Apple 的軟件可以被山寨,雲服務和生態可以被追趕,那麼硬件的差距就是橫在 Apple 和安卓廠商之間的天塹。
身爲一個安卓人,俺從那時起就一直在想,這功能啥時候能下放安卓啊。想着想着,時間就來到了 2024 年。九月的一天,正在瀏覽科技類新聞的我看到了一個標題——
《藍牙 6.0 標準公開:支持無線測距》😇
甚麼?安卓用戶的幸福時刻要到來了?俺連夜學習技術文檔,得知了工程師們通過對硬件做出最低限度的更改,並利用一種叫「基於相位測距 (Phase-Based Ranging/PBR)」的技術,巧妙地把無線測距功能搬到了藍牙上。
當時的俺覺得,PBR 是帶着鐐銬跳舞的技術,是藍牙在面對 UWB 時唱出的最後的悲歌 😅 不過這玩意確實值得掰一掰,於是我發表了一篇 blog 叫《無線測距系統的奧妙(上)》。
可是在下篇應該怎麼寫這件事上,我陷入了江局。因爲在手撕 PBR 之前,我需要先解釋 UWB;要手撕 UWB,就必須理解數字信號處理和通信原理的一些知識,而當時的俺還不具備把示波器搬上 blog 的能力,光是文字描述也沒法傳授這些知識。於是這個系列就沒了下文。
2026 年,我對於這個話題已經變得足夠普通且自信,現在就讓我來把這個坑填了吧!
2. 基於頻率和相位差的測算
藍牙的工作頻率在 2.4 G 附近,並且單個頻道帶寬是 2 MHz 甚至是 1 MHz。根據俺們之前的分析,這麼窄的信道帶寬沒法產生足夠尖銳的脈衝,也就無法測出脈衝的到達時間,導致其無法進行 ToF 測距。所以不要再問「爲什麼我不能在檢測到波形的一瞬間記錄時間」了 😇
那麼這次藍牙 6.0 的 PBR 究竟是用了甚麼黑魔法來實現測距的呢?
從數學上來看,PBR 可以被概括爲一句話:
- 利用多個已知頻率間隔的載波,通過測量接收信號的相位差()的變化量與頻率變化()的線性比例關係 (斜率) 來計算飛行距離():
按照普通通信教材 (普信教材) 的劇本,接下來就要進行數學推導了。首先是列兩個正弦波方程,然後在一通不知所云的求解之後會得到上面那個式子。不幸的是,我以往接受的就是這種神魔教育。而這種教育方法能真正教會學生嗎?如會。我也知道大家很討厭這種教科書式寫法,所以這裏我決定略過數學推導,讓我們先想象以下場景——
現有 A、B 兩臺藍牙設備如下,他倆天賦異稟,內部振盪器完全同步。
現在把他倆分開,其距離未知。爲了測量這段距離,A 向 B 發出了一道 2.4 GHz 的正弦波:
根據 ,這個波的波長是 0.125 米。要求解 AB 之間的距離,只需要知道他倆之間有多少個波長就好了。但是 B 並不具有上帝視角,沒法看到波在半途中的狀況,他能看到的就只有波到達自己的時候的相位(右邊的橙色圓圈)。由於 B 和 A 的振盪器完全同步,B 可以計算出這個波在終點時相對於起點時的相位差 :
B 並不知道這個信號到達自己之前在空中到底轉過了多少圈,所以相位差上面會有一個 的未知項。只要……只要能求出在空中轉過的圈數 ,再用相位差算出最後的小半圈是多長,兩者之間的距離 就近在眼前了,他們之間的關係是:
我們需要嘗試構造一個方程來解出 。爲此,我們可以讓 A 改變發射頻率到 2.41 GHz:
然後讓 B 重新測量相位差 :
重新列出算式:
觀察上述兩個方程可知,俺們現在有 、、 三個未知數,要解出 d 就必須要消滅掉其中一個 n。那麼現在我們想要知道的是,這個波在改變了一點點頻率,再次到達 B 的時候,在空中轉過的完整圈數是否改變了呢?陷入沉思……
- 頻率提高了一點點(提高了 10 MHz)
- 波長縮短了一點點(縮短了 0.52 毫米)
- 這個波在空中轉過了好多好多圈,要是每一圈的波長都縮短了一點點的話……
- 有沒有可能要多轉一圈才能到達 B?
- 假設這個波多轉了一圈,相當於波長的縮短在這麼長距離的累積下,總共縮短了一個 (這裏算波長是 0.125 米)
- 每一圈縮短 0.52 毫米,累積要縮短 0.125 米的話,波在空中至少要轉 241 圈
- 241 個波長相當於 30 米
也就是說,在俺們的實驗條件下,只要測距距離不超過 30 米,就算稍微調整了一下頻率(調整了一下彈簧的緊密程度),波在空中旋轉過的完整圈數是不會變的。於是我們就可以對比兩次測量得出的「最後那一小截角度(相位差)」來反推出總距離。
根據上述思考,。現在留給我們的就是兩個方程求解兩個未知數了,在一通高中水平的代數操作和化簡過後,解得:
轉過的完整圈數:
所求距離:
從式子中可見,距離和「相位差的變化除以頻率的變化」成正比。要是我們畫一張圖,橫軸是頻率 ,縱軸是在這個頻率下測量得到的相位差 ,然後把測量結果的點畫上去,用直線連起來,這個直線的斜率乘上 就是我們想要的距離了。上面舉的例子屬於是測量兩個點然後計算直線斜率的方法。
爲了提高測距的精確度,藍牙設備在測量相位差時,會嘗試多更換幾個頻點來避免干擾和測量誤差,如上圖所示。在每個頻點的測量全部完成之後,設備會用直線進行擬合,然後計算出所需的斜率,求解出最終的距離。
3. 兩臺設備的精密配合
到了這邊,數學原理的部分就講完了。但是別忘了,俺們的理論中還有一塊最大的缺漏——俺們在一開始假設了 A 和 B 的內部振盪器完全同步,但是這是不可能的。試想大街上走來一個人,妳會覺得她的腦迴路和妳同步嗎?所以現實中大概率是這樣的:
由於 B 的振盪器和 A 不同步,計算相位差的任務就不能交給 B 來做了,因爲 B 根本不知道出發時候的相位是啥。那麼剩下的路只剩一條: A 親自上陣,親自測量波返回時和出發時的相位差。
爲了達成這個目標,B 需要配合 A,將接收到的波形按照原頻率、原相位發射回去。這聽上去是個不可能的任務,妳該怎麼精確追蹤每秒變動幾十億次的波形……但是世界上有一種好用的東西叫做鎖相環,B 可以用鎖相環的輸出信號來精確同步自己的內部振盪器。
最後,整個系統的工作狀態如下所示。注意右邊 B 的振盪器相位和接收信號的相位鎖定。
按照老方法,在 A 處求出這個頻率下的相位差爲:
這之後的步驟就和之前討論的一樣了:多取幾個不同的頻率,測出相位差,描點並擬合斜率。在 B 充當反射端的場景下,測出的長度是信號一去一回的路程,所以最終距離的公式,應該給上面方程的解除以 2:
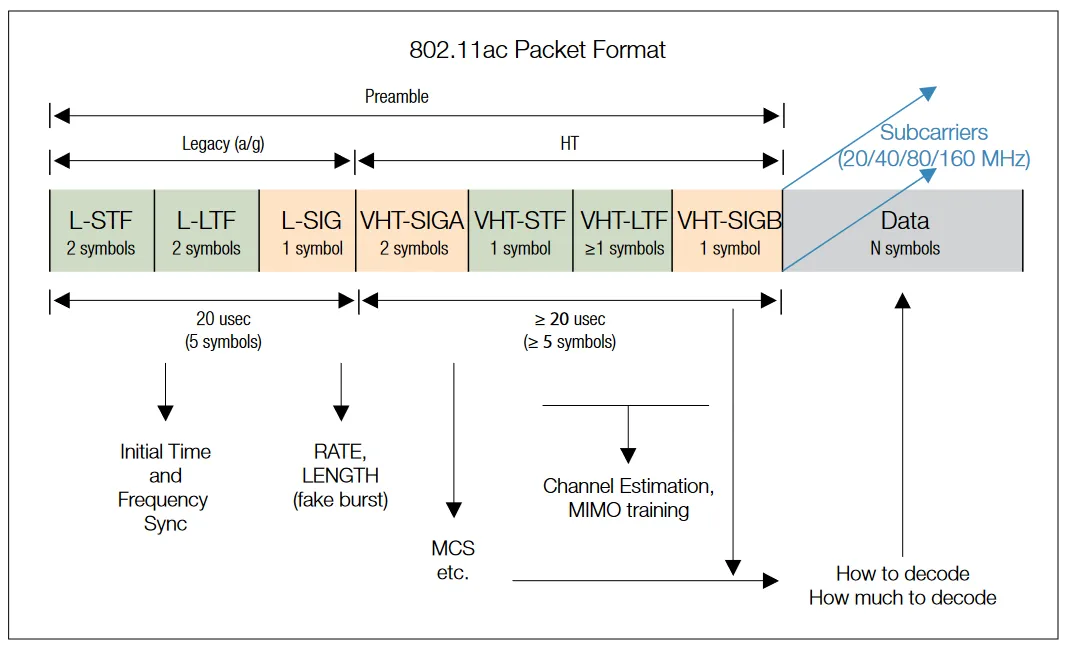
最後,爲了方便妳理解,我畫了一個 PBR 測距流程圖,希望妳能看懂 😋
%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='0' y='1115' fill='%23eaeaea' stroke='%23666' width='150' height='65' name='A' rx='3' ry='3' class='actor actor-bottom'/%3e%3ctext x='75' y='1147.5' dominant-baseline='central' alignment-baseline='central' class='actor actor-box' style='text-anchor: middle%3b font-size: 16px%3b font-weight: 400%3b font-family: arial%2c sans-serif%3b'%3e%3ctspan x='75' dy='0'%3e%e8%a8%ad%e5%82%99 A (%e7%99%bc%e9%80%81%e7%ab%af)%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3cline id='actor1' x1='386' y1='65' x2='386' y2='1115' class='actor-line 200' stroke-width='0.5px' stroke='%23999' name='B'/%3e%3cg id='root-1'%3e%3crect x='311' y='0' fill='%23eaeaea' stroke='%23666' width='150' height='65' name='B' rx='3' ry='3' class='actor actor-top'/%3e%3ctext x='386' y='32.5' dominant-baseline='central' alignment-baseline='central' class='actor actor-box' style='text-anchor: middle%3b font-size: 16px%3b font-weight: 400%3b font-family: arial%2c sans-serif%3b'%3e%3ctspan x='386' dy='0'%3e%e8%a8%ad%e5%82%99 B (%e5%8f%8d%e5%b0%84%e7%ab%af)%3c/tspan%3e%3c/text%3e%3c/g%3e%3c/g%3e%3cg%3e%3cline id='actor0' x1='75' y1='65' x2='75' y2='1115' class='actor-line 200' stroke-width='0.5px' stroke='%23999' name='A'/%3e%3cg id='root-0'%3e%3crect x='0' y='0' fill='%23eaeaea' stroke='%23666' width='150' height='65' name='A' rx='3' ry='3' class='actor actor-top'/%3e%3ctext x='75' y='32.5' dominant-baseline='central' alignment-baseline='central' class='actor actor-box' style='text-anchor: middle%3b font-size: 16px%3b font-weight: 400%3b font-family: arial%2c sans-serif%3b'%3e%3ctspan x='75' dy='0'%3e%e8%a8%ad%e5%82%99 A (%e7%99%bc%e9%80%81%e7%ab%af)%3c/tspan%3e%3c/text%3e%3c/g%3e%3c/g%3e%3cstyle%3e%23mermaid-chart-1%7bfont-family:arial%2csans-serif%3bfont-size:16px%3bfill:%23333%3b%7d%40keyframes edge-animation-frame%7bfrom%7bstroke-dashoffset:0%3b%7d%7d%40keyframes dash%7bto%7bstroke-dashoffset:0%3b%7d%7d%23mermaid-chart-1 .edge-animation-slow%7bstroke-dasharray:9%2c5!important%3bstroke-dashoffset:900%3banimation:dash 50s linear infinite%3bstroke-linecap:round%3b%7d%23mermaid-chart-1 .edge-animation-fast%7bstroke-dasharray:9%2c5!important%3bstroke-dashoffset:900%3banimation:dash 20s linear infinite%3bstroke-linecap:round%3b%7d%23mermaid-chart-1 .error-icon%7bfill:%23552222%3b%7d%23mermaid-chart-1 .error-text%7bfill:%23552222%3bstroke:%23552222%3b%7d%23mermaid-chart-1 .edge-thickness-normal%7bstroke-width:1px%3b%7d%23mermaid-chart-1 .edge-thickness-thick%7bstroke-width:3.5px%3b%7d%23mermaid-chart-1 .edge-pattern-solid%7bstroke-dasharray:0%3b%7d%23mermaid-chart-1 .edge-thickness-invisible%7bstroke-width:0%3bfill:none%3b%7d%23mermaid-chart-1 .edge-pattern-dashed%7bstroke-dasharray:3%3b%7d%23mermaid-chart-1 .edge-pattern-dotted%7bstroke-dasharray:2%3b%7d%23mermaid-chart-1 .marker%7bfill:%23333333%3bstroke:%23333333%3b%7d%23mermaid-chart-1 .marker.cross%7bstroke:%23333333%3b%7d%23mermaid-chart-1 svg%7bfont-family:arial%2csans-serif%3bfont-size:16px%3b%7d%23mermaid-chart-1 p%7bmargin:0%3b%7d%23mermaid-chart-1 .actor%7bstroke:hsl(259.6261682243%2c 59.7765363128%25%2c 87.9019607843%25)%3bfill:%23ECECFF%3b%7d%23mermaid-chart-1 text.actor%26gt%3btspan%7bfill:black%3bstroke:none%3b%7d%23mermaid-chart-1 .actor-line%7bstroke:hsl(259.6261682243%2c 59.7765363128%25%2c 87.9019607843%25)%3b%7d%23mermaid-chart-1 .innerArc%7bstroke-width:1.5%3bstroke-dasharray:none%3b%7d%23mermaid-chart-1 .messageLine0%7bstroke-width:1.5%3bstroke-dasharray:none%3bstroke:%23333%3b%7d%23mermaid-chart-1 .messageLine1%7bstroke-width:1.5%3bstroke-dasharray:2%2c2%3bstroke:%23333%3b%7d%23mermaid-chart-1 %23arrowhead path%7bfill:%23333%3bstroke:%23333%3b%7d%23mermaid-chart-1 .sequenceNumber%7bfill:white%3b%7d%23mermaid-chart-1 %23sequencenumber%7bfill:%23333%3b%7d%23mermaid-chart-1 %23crosshead path%7bfill:%23333%3bstroke:%23333%3b%7d%23mermaid-chart-1 .messageText%7bfill:%23333%3bstroke:none%3b%7d%23mermaid-chart-1 .labelBox%7bstroke:hsl(259.6261682243%2c 59.7765363128%25%2c 87.9019607843%25)%3bfill:%23ECECFF%3b%7d%23mermaid-chart-1 .labelText%2c%23mermaid-chart-1 .labelText%26gt%3btspan%7bfill:black%3bstroke:none%3b%7d%23mermaid-chart-1 .loopText%2c%23mermaid-chart-1 .loopText%26gt%3btspan%7bfill:black%3bstroke:none%3b%7d%23mermaid-chart-1 .loopLine%7bstroke-width:2px%3bstroke-dasharray:2%2c2%3bstroke:hsl(259.6261682243%2c 59.7765363128%25%2c 87.9019607843%25)%3bfill:hsl(259.6261682243%2c 59.7765363128%25%2c 87.9019607843%25)%3b%7d%23mermaid-chart-1 .note%7bstroke:%23aaaa33%3bfill:%23fff5ad%3b%7d%23mermaid-chart-1 .noteText%2c%23mermaid-chart-1 .noteText%26gt%3btspan%7bfill:black%3bstroke:none%3b%7d%23mermaid-chart-1 .activation0%7bfill:%23f4f4f4%3bstroke:%23666%3b%7d%23mermaid-chart-1 .activation1%7bfill:%23f4f4f4%3bstroke:%23666%3b%7d%23mermaid-chart-1 .activation2%7bfill:%23f4f4f4%3bstroke:%23666%3b%7d%23mermaid-chart-1 .actorPopupMenu%7bposition:absolute%3b%7d%23mermaid-chart-1 .actorPopupMenuPanel%7bposition:absolute%3bfill:%23ECECFF%3bbox-shadow:0px 8px 16px 0px rgba(0%2c0%2c0%2c0.2)%3bfilter:drop-shadow(3px 5px 2px rgb(0 0 0 / 0.4))%3b%7d%23mermaid-chart-1 .actor-man line%7bstroke:hsl(259.6261682243%2c 59.7765363128%25%2c 87.9019607843%25)%3bfill:%23ECECFF%3b%7d%23mermaid-chart-1 .actor-man circle%2c%23mermaid-chart-1 line%7bstroke:hsl(259.6261682243%2c 59.7765363128%25%2c 87.9019607843%25)%3bfill:%23ECECFF%3bstroke-width:2px%3b%7d%23mermaid-chart-1 :root%7b--mermaid-font-family:arial%2csans-serif%3b%7d%3c/style%3e%3cg/%3e%3cdefs%3e%3csymbol id='computer' width='24' height='24'%3e%3cpath transform='scale(.5)' d='M2 2v13h20v-13h-20zm18 11h-16v-9h16v9zm-10.228 6l.466-1h3.524l.467 1h-4.457zm14.228 3h-24l2-6h2.104l-1.33 4h18.45l-1.297-4h2.073l2 6zm-5-10h-14v-7h14v7z'/%3e%3c/symbol%3e%3c/defs%3e%3cdefs%3e%3csymbol id='database' fill-rule='evenodd' clip-rule='evenodd'%3e%3cpath transform='scale(.5)' d='M12.258.001l.256.004.255.005.253.008.251.01.249.012.247.015.246.016.242.019.241.02.239.023.236.024.233.027.231.028.229.031.225.032.223.034.22.036.217.038.214.04.211.041.208.043.205.045.201.046.198.048.194.05.191.051.187.053.183.054.18.056.175.057.172.059.168.06.163.061.16.063.155.064.15.066.074.033.073.033.071.034.07.034.069.035.068.035.067.035.066.035.064.036.064.036.062.036.06.036.06.037.058.037.058.037.055.038.055.038.053.038.052.038.051.039.05.039.048.039.047.039.045.04.044.04.043.04.041.04.04.041.039.041.037.041.036.041.034.041.033.042.032.042.03.042.029.042.027.042.026.043.024.043.023.043.021.043.02.043.018.044.017.043.015.044.013.044.012.044.011.045.009.044.007.045.006.045.004.045.002.045.001.045v17l-.001.045-.002.045-.004.045-.006.045-.007.045-.009.044-.011.045-.012.044-.013.044-.015.044-.017.043-.018.044-.02.043-.021.043-.023.043-.024.043-.026.043-.027.042-.029.042-.03.042-.032.042-.033.042-.034.041-.036.041-.037.041-.039.041-.04.041-.041.04-.043.04-.044.04-.045.04-.047.039-.048.039-.05.039-.051.039-.052.038-.053.038-.055.038-.055.038-.058.037-.058.037-.06.037-.06.036-.062.036-.064.036-.064.036-.066.035-.067.035-.068.035-.069.035-.07.034-.071.034-.073.033-.074.033-.15.066-.155.064-.16.063-.163.061-.168.06-.172.059-.175.057-.18.056-.183.054-.187.053-.191.051-.194.05-.198.048-.201.046-.205.045-.208.043-.211.041-.214.04-.217.038-.22.036-.223.034-.225.032-.229.031-.231.028-.233.027-.236.024-.239.023-.241.02-.242.019-.246.016-.247.015-.249.012-.251.01-.253.008-.255.005-.256.004-.258.001-.258-.001-.256-.004-.255-.005-.253-.008-.251-.01-.249-.012-.247-.015-.245-.016-.243-.019-.241-.02-.238-.023-.236-.024-.234-.027-.231-.028-.228-.031-.226-.032-.223-.034-.22-.036-.217-.038-.214-.04-.211-.041-.208-.043-.204-.045-.201-.046-.198-.048-.195-.05-.19-.051-.187-.053-.184-.054-.179-.056-.176-.057-.172-.059-.167-.06-.164-.061-.159-.063-.155-.064-.151-.066-.074-.033-.072-.033-.072-.034-.07-.034-.069-.035-.068-.035-.067-.035-.066-.035-.064-.036-.063-.036-.062-.036-.061-.036-.06-.037-.058-.037-.057-.037-.056-.038-.055-.038-.053-.038-.052-.038-.051-.039-.049-.039-.049-.039-.046-.039-.046-.04-.044-.04-.043-.04-.041-.04-.04-.041-.039-.041-.037-.041-.036-.041-.034-.041-.033-.042-.032-.042-.03-.042-.029-.042-.027-.042-.026-.043-.024-.043-.023-.043-.021-.043-.02-.043-.018-.044-.017-.043-.015-.044-.013-.044-.012-.044-.011-.045-.009-.044-.007-.045-.006-.045-.004-.045-.002-.045-.001-.045v-17l.001-.045.002-.045.004-.045.006-.045.007-.045.009-.044.011-.045.012-.044.013-.044.015-.044.017-.043.018-.044.02-.043.021-.043.023-.043.024-.043.026-.043.027-.042.029-.042.03-.042.032-.042.033-.042.034-.041.036-.041.037-.041.039-.041.04-.041.041-.04.043-.04.044-.04.046-.04.046-.039.049-.039.049-.039.051-.039.052-.038.053-.038.055-.038.056-.038.057-.037.058-.037.06-.037.061-.036.062-.036.063-.036.064-.036.066-.035.067-.035.068-.035.069-.035.07-.034.072-.034.072-.033.074-.033.151-.066.155-.064.159-.063.164-.061.167-.06.172-.059.176-.057.179-.056.184-.054.187-.053.19-.051.195-.05.198-.048.201-.046.204-.045.208-.043.211-.041.214-.04.217-.038.22-.036.223-.034.226-.032.228-.031.231-.028.234-.027.236-.024.238-.023.241-.02.243-.019.245-.016.247-.015.249-.012.251-.01.253-.008.255-.005.256-.004.258-.001.258.001zm-9.258 20.499v.01l.001.021.003.021.004.022.005.021.006.022.007.022.009.023.01.022.011.023.012.023.013.023.015.023.016.024.017.023.018.024.019.024.021.024.022.025.023.024.024.025.052.049.056.05.061.051.066.051.07.051.075.051.079.052.084.052.088.052.092.052.097.052.102.051.105.052.11.052.114.051.119.051.123.051.127.05.131.05.135.05.139.048.144.049.147.047.152.047.155.047.16.045.163.045.167.043.171.043.176.041.178.041.183.039.187.039.19.037.194.035.197.035.202.033.204.031.209.03.212.029.216.027.219.025.222.024.226.021.23.02.233.018.236.016.24.015.243.012.246.01.249.008.253.005.256.004.259.001.26-.001.257-.004.254-.005.25-.008.247-.011.244-.012.241-.014.237-.016.233-.018.231-.021.226-.021.224-.024.22-.026.216-.027.212-.028.21-.031.205-.031.202-.034.198-.034.194-.036.191-.037.187-.039.183-.04.179-.04.175-.042.172-.043.168-.044.163-.045.16-.046.155-.046.152-.047.148-.048.143-.049.139-.049.136-.05.131-.05.126-.05.123-.051.118-.052.114-.051.11-.052.106-.052.101-.052.096-.052.092-.052.088-.053.083-.051.079-.052.074-.052.07-.051.065-.051.06-.051.056-.05.051-.05.023-.024.023-.025.021-.024.02-.024.019-.024.018-.024.017-.024.015-.023.014-.024.013-.023.012-.023.01-.023.01-.022.008-.022.006-.022.006-.022.004-.022.004-.021.001-.021.001-.021v-4.127l-.077.055-.08.053-.083.054-.085.053-.087.052-.09.052-.093.051-.095.05-.097.05-.1.049-.102.049-.105.048-.106.047-.109.047-.111.046-.114.045-.115.045-.118.044-.12.043-.122.042-.124.042-.126.041-.128.04-.13.04-.132.038-.134.038-.135.037-.138.037-.139.035-.142.035-.143.034-.144.033-.147.032-.148.031-.15.03-.151.03-.153.029-.154.027-.156.027-.158.026-.159.025-.161.024-.162.023-.163.022-.165.021-.166.02-.167.019-.169.018-.169.017-.171.016-.173.015-.173.014-.175.013-.175.012-.177.011-.178.01-.179.008-.179.008-.181.006-.182.005-.182.004-.184.003-.184.002h-.37l-.184-.002-.184-.003-.182-.004-.182-.005-.181-.006-.179-.008-.179-.008-.178-.01-.176-.011-.176-.012-.175-.013-.173-.014-.172-.015-.171-.016-.17-.017-.169-.018-.167-.019-.166-.02-.165-.021-.163-.022-.162-.023-.161-.024-.159-.025-.157-.026-.156-.027-.155-.027-.153-.029-.151-.03-.15-.03-.148-.031-.146-.032-.145-.033-.143-.034-.141-.035-.14-.035-.137-.037-.136-.037-.134-.038-.132-.038-.13-.04-.128-.04-.126-.041-.124-.042-.122-.042-.12-.044-.117-.043-.116-.045-.113-.045-.112-.046-.109-.047-.106-.047-.105-.048-.102-.049-.1-.049-.097-.05-.095-.05-.093-.052-.09-.051-.087-.052-.085-.053-.083-.054-.08-.054-.077-.054v4.127zm0-5.654v.011l.001.021.003.021.004.021.005.022.006.022.007.022.009.022.01.022.011.023.012.023.013.023.015.024.016.023.017.024.018.024.019.024.021.024.022.024.023.025.024.024.052.05.056.05.061.05.066.051.07.051.075.052.079.051.084.052.088.052.092.052.097.052.102.052.105.052.11.051.114.051.119.052.123.05.127.051.131.05.135.049.139.049.144.048.147.048.152.047.155.046.16.045.163.045.167.044.171.042.176.042.178.04.183.04.187.038.19.037.194.036.197.034.202.033.204.032.209.03.212.028.216.027.219.025.222.024.226.022.23.02.233.018.236.016.24.014.243.012.246.01.249.008.253.006.256.003.259.001.26-.001.257-.003.254-.006.25-.008.247-.01.244-.012.241-.015.237-.016.233-.018.231-.02.226-.022.224-.024.22-.025.216-.027.212-.029.21-.03.205-.032.202-.033.198-.035.194-.036.191-.037.187-.039.183-.039.179-.041.175-.042.172-.043.168-.044.163-.045.16-.045.155-.047.152-.047.148-.048.143-.048.139-.05.136-.049.131-.05.126-.051.123-.051.118-.051.114-.052.11-.052.106-.052.101-.052.096-.052.092-.052.088-.052.083-.052.079-.052.074-.051.07-.052.065-.051.06-.05.056-.051.051-.049.023-.025.023-.024.021-.025.02-.024.019-.024.018-.024.017-.024.015-.023.014-.023.013-.024.012-.022.01-.023.01-.023.008-.022.006-.022.006-.022.004-.021.004-.022.001-.021.001-.021v-4.139l-.077.054-.08.054-.083.054-.085.052-.087.053-.09.051-.093.051-.095.051-.097.05-.1.049-.102.049-.105.048-.106.047-.109.047-.111.046-.114.045-.115.044-.118.044-.12.044-.122.042-.124.042-.126.041-.128.04-.13.039-.132.039-.134.038-.135.037-.138.036-.139.036-.142.035-.143.033-.144.033-.147.033-.148.031-.15.03-.151.03-.153.028-.154.028-.156.027-.158.026-.159.025-.161.024-.162.023-.163.022-.165.021-.166.02-.167.019-.169.018-.169.017-.171.016-.173.015-.173.014-.175.013-.175.012-.177.011-.178.009-.179.009-.179.007-.181.007-.182.005-.182.004-.184.003-.184.002h-.37l-.184-.002-.184-.003-.182-.004-.182-.005-.181-.007-.179-.007-.179-.009-.178-.009-.176-.011-.176-.012-.175-.013-.173-.014-.172-.015-.171-.016-.17-.017-.169-.018-.167-.019-.166-.02-.165-.021-.163-.022-.162-.023-.161-.024-.159-.025-.157-.026-.156-.027-.155-.028-.153-.028-.151-.03-.15-.03-.148-.031-.146-.033-.145-.033-.143-.033-.141-.035-.14-.036-.137-.036-.136-.037-.134-.038-.132-.039-.13-.039-.128-.04-.126-.041-.124-.042-.122-.043-.12-.043-.117-.044-.116-.044-.113-.046-.112-.046-.109-.046-.106-.047-.105-.048-.102-.049-.1-.049-.097-.05-.095-.051-.093-.051-.09-.051-.087-.053-.085-.052-.083-.054-.08-.054-.077-.054v4.139zm0-5.666v.011l.001.02.003.022.004.021.005.022.006.021.007.022.009.023.01.022.011.023.012.023.013.023.015.023.016.024.017.024.018.023.019.024.021.025.022.024.023.024.024.025.052.05.056.05.061.05.066.051.07.051.075.052.079.051.084.052.088.052.092.052.097.052.102.052.105.051.11.052.114.051.119.051.123.051.127.05.131.05.135.05.139.049.144.048.147.048.152.047.155.046.16.045.163.045.167.043.171.043.176.042.178.04.183.04.187.038.19.037.194.036.197.034.202.033.204.032.209.03.212.028.216.027.219.025.222.024.226.021.23.02.233.018.236.017.24.014.243.012.246.01.249.008.253.006.256.003.259.001.26-.001.257-.003.254-.006.25-.008.247-.01.244-.013.241-.014.237-.016.233-.018.231-.02.226-.022.224-.024.22-.025.216-.027.212-.029.21-.03.205-.032.202-.033.198-.035.194-.036.191-.037.187-.039.183-.039.179-.041.175-.042.172-.043.168-.044.163-.045.16-.045.155-.047.152-.047.148-.048.143-.049.139-.049.136-.049.131-.051.126-.05.123-.051.118-.052.114-.051.11-.052.106-.052.101-.052.096-.052.092-.052.088-.052.083-.052.079-.052.074-.052.07-.051.065-.051.06-.051.056-.05.051-.049.023-.025.023-.025.021-.024.02-.024.019-.024.018-.024.017-.024.015-.023.014-.024.013-.023.012-.023.01-.022.01-.023.008-.022.006-.022.006-.022.004-.022.004-.021.001-.021.001-.021v-4.153l-.077.054-.08.054-.083.053-.085.053-.087.053-.09.051-.093.051-.095.051-.097.05-.1.049-.102.048-.105.048-.106.048-.109.046-.111.046-.114.046-.115.044-.118.044-.12.043-.122.043-.124.042-.126.041-.128.04-.13.039-.132.039-.134.038-.135.037-.138.036-.139.036-.142.034-.143.034-.144.033-.147.032-.148.032-.15.03-.151.03-.153.028-.154.028-.156.027-.158.026-.159.024-.161.024-.162.023-.163.023-.165.021-.166.02-.167.019-.169.018-.169.017-.171.016-.173.015-.173.014-.175.013-.175.012-.177.01-.178.01-.179.009-.179.007-.181.006-.182.006-.182.004-.184.003-.184.001-.185.001-.185-.001-.184-.001-.184-.003-.182-.004-.182-.006-.181-.006-.179-.007-.179-.009-.178-.01-.176-.01-.176-.012-.175-.013-.173-.014-.172-.015-.171-.016-.17-.017-.169-.018-.167-.019-.166-.02-.165-.021-.163-.023-.162-.023-.161-.024-.159-.024-.157-.026-.156-.027-.155-.028-.153-.028-.151-.03-.15-.03-.148-.032-.146-.032-.145-.033-.143-.034-.141-.034-.14-.036-.137-.036-.136-.037-.134-.038-.132-.039-.13-.039-.128-.041-.126-.041-.124-.041-.122-.043-.12-.043-.117-.044-.116-.044-.113-.046-.112-.046-.109-.046-.106-.048-.105-.048-.102-.048-.1-.05-.097-.049-.095-.051-.093-.051-.09-.052-.087-.052-.085-.053-.083-.053-.08-.054-.077-.054v4.153zm8.74-8.179l-.257.004-.254.005-.25.008-.247.011-.244.012-.241.014-.237.016-.233.018-.231.021-.226.022-.224.023-.22.026-.216.027-.212.028-.21.031-.205.032-.202.033-.198.034-.194.036-.191.038-.187.038-.183.04-.179.041-.175.042-.172.043-.168.043-.163.045-.16.046-.155.046-.152.048-.148.048-.143.048-.139.049-.136.05-.131.05-.126.051-.123.051-.118.051-.114.052-.11.052-.106.052-.101.052-.096.052-.092.052-.088.052-.083.052-.079.052-.074.051-.07.052-.065.051-.06.05-.056.05-.051.05-.023.025-.023.024-.021.024-.02.025-.019.024-.018.024-.017.023-.015.024-.014.023-.013.023-.012.023-.01.023-.01.022-.008.022-.006.023-.006.021-.004.022-.004.021-.001.021-.001.021.001.021.001.021.004.021.004.022.006.021.006.023.008.022.01.022.01.023.012.023.013.023.014.023.015.024.017.023.018.024.019.024.02.025.021.024.023.024.023.025.051.05.056.05.06.05.065.051.07.052.074.051.079.052.083.052.088.052.092.052.096.052.101.052.106.052.11.052.114.052.118.051.123.051.126.051.131.05.136.05.139.049.143.048.148.048.152.048.155.046.16.046.163.045.168.043.172.043.175.042.179.041.183.04.187.038.191.038.194.036.198.034.202.033.205.032.21.031.212.028.216.027.22.026.224.023.226.022.231.021.233.018.237.016.241.014.244.012.247.011.25.008.254.005.257.004.26.001.26-.001.257-.004.254-.005.25-.008.247-.011.244-.012.241-.014.237-.016.233-.018.231-.021.226-.022.224-.023.22-.026.216-.027.212-.028.21-.031.205-.032.202-.033.198-.034.194-.036.191-.038.187-.038.183-.04.179-.041.175-.042.172-.043.168-.043.163-.045.16-.046.155-.046.152-.048.148-.048.143-.048.139-.049.136-.05.131-.05.126-.051.123-.051.118-.051.114-.052.11-.052.106-.052.101-.052.096-.052.092-.052.088-.052.083-.052.079-.052.074-.051.07-.052.065-.051.06-.05.056-.05.051-.05.023-.025.023-.024.021-.024.02-.025.019-.024.018-.024.017-.023.015-.024.014-.023.013-.023.012-.023.01-.023.01-.022.008-.022.006-.023.006-.021.004-.022.004-.021.001-.021.001-.021-.001-.021-.001-.021-.004-.021-.004-.022-.006-.021-.006-.023-.008-.022-.01-.022-.01-.023-.012-.023-.013-.023-.014-.023-.015-.024-.017-.023-.018-.024-.019-.024-.02-.025-.021-.024-.023-.024-.023-.025-.051-.05-.056-.05-.06-.05-.065-.051-.07-.052-.074-.051-.079-.052-.083-.052-.088-.052-.092-.052-.096-.052-.101-.052-.106-.052-.11-.052-.114-.052-.118-.051-.123-.051-.126-.051-.131-.05-.136-.05-.139-.049-.143-.048-.148-.048-.152-.048-.155-.046-.16-.046-.163-.045-.168-.043-.172-.043-.175-.042-.179-.041-.183-.04-.187-.038-.191-.038-.194-.036-.198-.034-.202-.033-.205-.032-.21-.031-.212-.028-.216-.027-.22-.026-.224-.023-.226-.022-.231-.021-.233-.018-.237-.016-.241-.014-.244-.012-.247-.011-.25-.008-.254-.005-.257-.004-.26-.001-.26.001z'/%3e%3c/symbol%3e%3c/defs%3e%3cdefs%3e%3csymbol id='clock' width='24' height='24'%3e%3cpath transform='scale(.5)' d='M12 2c5.514 0 10 4.486 10 10s-4.486 10-10 10-10-4.486-10-10 4.486-10 10-10zm0-2c-6.627 0-12 5.373-12 12s5.373 12 12 12 12-5.373 12-12-5.373-12-12-12zm5.848 12.459c.202.038.202.333.001.372-1.907.361-6.045 1.111-6.547 1.111-.719 0-1.301-.582-1.301-1.301 0-.512.77-5.447 1.125-7.445.034-.192.312-.181.343.014l.985 6.238 5.394 1.011z'/%3e%3c/symbol%3e%3c/defs%3e%3cdefs%3e%3cmarker id='arrowhead' refX='7.9' refY='5' markerUnits='userSpaceOnUse' markerWidth='12' markerHeight='12' orient='auto-start-reverse'%3e%3cpath d='M -1 0 L 10 5 L 0 10 z'/%3e%3c/marker%3e%3c/defs%3e%3cdefs%3e%3cmarker id='crosshead' markerWidth='15' markerHeight='8' orient='auto' refX='4' refY='4.5'%3e%3cpath fill='none' stroke='black' stroke-width='1pt' d='M 1%2c2 L 6%2c7 M 6%2c2 L 1%2c7' style='stroke-dasharray: 0%2c 0%3b'/%3e%3c/marker%3e%3c/defs%3e%3cdefs%3e%3cmarker id='filled-head' refX='15.5' refY='7' markerWidth='20' markerHeight='28' orient='auto'%3e%3cpath d='M 18%2c7 L9%2c13 L14%2c7 L9%2c1 Z'/%3e%3c/marker%3e%3c/defs%3e%3cdefs%3e%3cmarker id='sequencenumber' refX='15' refY='15' markerWidth='60' markerHeight='40' orient='auto'%3e%3ccircle cx='15' cy='15' r='6'/%3e%3c/marker%3e%3c/defs%3e%3cdefs%3e%3cmarker id='solidTopArrowHead' refX='7.9' refY='7.25' markerUnits='userSpaceOnUse' markerWidth='12' markerHeight='12' orient='auto-start-reverse'%3e%3cpath d='M 0 0 L 10 8 L 0 8 z'/%3e%3c/marker%3e%3c/defs%3e%3cdefs%3e%3cmarker id='solidBottomArrowHead' refX='7.9' refY='0.75' markerUnits='userSpaceOnUse' markerWidth='12' markerHeight='12' orient='auto-start-reverse'%3e%3cpath d='M 0 0 L 10 0 L 0 8 z'/%3e%3c/marker%3e%3c/defs%3e%3cdefs%3e%3cmarker id='stickTopArrowHead' refX='7.5' refY='7' markerUnits='userSpaceOnUse' markerWidth='12' markerHeight='12' orient='auto-start-reverse'%3e%3cpath d='M 0 0 L 7 7' stroke='black' stroke-width='1.5' fill='none'/%3e%3c/marker%3e%3c/defs%3e%3cdefs%3e%3cmarker id='stickBottomArrowHead' refX='7.5' refY='0' markerUnits='userSpaceOnUse' markerWidth='12' markerHeight='12' orient='auto-start-reverse'%3e%3cpath d='M 0 7 L 7 0' stroke='black' stroke-width='1.5' fill='none'/%3e%3c/marker%3e%3c/defs%3e%3cg%3e%3crect x='50' y='75' fill='%23EDF2AE' stroke='%23666' width='361' height='37' class='note'/%3e%3ctext x='231' y='80' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='231'%3e%e7%ac%ac%e4%b8%80%e8%bc%aa%ef%bc%9a%e5%9f%ba%e7%a4%8e%e9%a0%bb%e7%8e%87%e5%b0%8d%e9%bd%8a%e8%b5%b7%e9%bb%9e%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='100' y='284' fill='%23EDF2AE' stroke='%23666' width='261' height='37' class='note'/%3e%3ctext x='231' y='289' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='231'%3eA %e8%a8%98%e9%8c%84%e4%b8%8b%e5%9b%9e%e5%82%b3%e6%b3%a2%e7%9a%84%e3%80%8c%e7%9b%b8%e4%bd%8d%e5%b7%ae%e3%80%8d %ce%94%cf%861%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='50' y='331' fill='%23EDF2AE' stroke='%23666' width='361' height='37' class='note'/%3e%3ctext x='231' y='336' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='231'%3e%e7%ac%ac%e4%ba%8c%e8%bc%aa%ef%bc%9a%e6%94%b9%e8%ae%8a%e9%a0%bb%e7%8e%87%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='100' y='540' fill='%23EDF2AE' stroke='%23666' width='150' height='37' class='note'/%3e%3ctext x='175' y='545' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='175'%3eA %e8%a8%98%e9%8c%84%e7%9b%b8%e4%bd%8d%e5%b7%ae %ce%94%cf%862%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='50' y='587' fill='%23EDF2AE' stroke='%23666' width='361' height='37' class='note'/%3e%3ctext x='231' y='592' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='231'%3e... %e6%9b%b4%e5%a4%9a%e8%bc%aa%e6%ac%a1 ...%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='50' y='634' fill='%23EDF2AE' stroke='%23666' width='361' height='37' class='note'/%3e%3ctext x='231' y='639' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='231'%3eA %e8%88%87 B %e6%9c%83%e6%8c%81%e7%ba%8c%e5%9c%a8%e5%a4%9a%e5%80%8b%e9%a0%bb%e9%81%93%e9%96%93%e5%88%87%e6%8f%9b (N %e8%bc%aa)%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='50' y='681' fill='%23EDF2AE' stroke='%23666' width='361' height='37' class='note'/%3e%3ctext x='231' y='686' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='231'%3e%e7%ac%ac N %e8%bc%aa%ef%bc%9a%e6%9c%80%e7%b5%82%e7%a2%ba%e8%aa%8d%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='100' y='890' fill='%23EDF2AE' stroke='%23666' width='151' height='37' class='note'/%3e%3ctext x='176' y='895' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='176'%3eA %e8%a8%98%e9%8c%84%e7%9b%b8%e4%bd%8d%e5%b7%ae %ce%94%cf%86N%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='50' y='937' fill='%23EDF2AE' stroke='%23666' width='361' height='37' class='note'/%3e%3ctext x='231' y='942' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='231'%3e%e7%b6%9c%e5%90%88%e5%88%86%e6%9e%90%3c/tspan%3e%3c/text%3e%3c/g%3e%3cg%3e%3crect x='100' y='984' fill='%23EDF2AE' stroke='%23666' width='248' height='37' class='note'/%3e%3ctext x='224' y='989' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='noteText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%3ctspan x='224'%3e%e5%b0%87%e9%80%99 N %e7%b5%84%e6%95%b8%e6%93%9a%e9%80%b2%e8%a1%8c%e3%80%8c%e7%9b%b4%e7%b7%9a%e6%93%ac%e5%90%88%e3%80%8d%3c/tspan%3e%3c/text%3e%3c/g%3e%3ctext x='229' y='127' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e7%99%bc%e5%b0%84%e4%b8%80%e5%80%8b%e4%bd%8e%e9%a0%bb%e7%8e%87%e7%9a%84%e6%b3%a2 (%e9%a0%bb%e7%8e%87 f1)%3c/text%3e%3cline x1='82' y1='156' x2='382' y2='156' class='messageLine0' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' style='fill: none%3b'/%3e%3cline x1='75' y1='156' x2='75' y2='156' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='75' y='160' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e1%3c/text%3e%3ctext x='387' y='171' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e7%b2%be%e7%a2%ba%e8%bf%bd%e8%b9%a4%e9%80%99%e5%80%8b%e6%b3%a2%3c/text%3e%3cpath d='M 387%2c200 C 447%2c190 447%2c230 387%2c220' class='messageLine1' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' x1='393' style='stroke-dasharray: 3%2c 3%3b fill: none%3b'/%3e%3cline x1='386' y1='200' x2='386' y2='200' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='386' y='204' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e2%3c/text%3e%3ctext x='232' y='245' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e5%9b%9e%e5%82%b3%e7%9b%b8%e5%90%8c%e7%9a%84%e6%b3%a2 (%e9%a0%bb%e7%8e%87 f1)%3c/text%3e%3cline x1='391' y1='274' x2='79' y2='274' class='messageLine1' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' style='stroke-dasharray: 3%2c 3%3b fill: none%3b'/%3e%3cline x1='386' y1='274' x2='386' y2='274' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='386' y='278' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e3%3c/text%3e%3ctext x='229' y='383' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e7%99%bc%e5%b0%84%e4%b8%80%e5%80%8b%e9%ab%98%e9%a0%bb%e7%8e%87%e7%9a%84%e6%b3%a2 (%e9%a0%bb%e7%8e%87 f2)%3c/text%3e%3cline x1='82' y1='412' x2='382' y2='412' class='messageLine0' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' style='fill: none%3b'/%3e%3cline x1='75' y1='412' x2='75' y2='412' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='75' y='416' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e4%3c/text%3e%3ctext x='387' y='427' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e7%b2%be%e7%a2%ba%e8%bf%bd%e8%b9%a4%e9%80%99%e5%80%8b%e6%b3%a2%3c/text%3e%3cpath d='M 387%2c456 C 447%2c446 447%2c486 387%2c476' class='messageLine1' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' x1='393' style='stroke-dasharray: 3%2c 3%3b fill: none%3b'/%3e%3cline x1='386' y1='456' x2='386' y2='456' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='386' y='460' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e5%3c/text%3e%3ctext x='232' y='501' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e5%9b%9e%e5%82%b3%e7%9b%b8%e5%90%8c%e7%9a%84%e6%b3%a2 (%e9%a0%bb%e7%8e%87 f2)%3c/text%3e%3cline x1='391' y1='530' x2='79' y2='530' class='messageLine1' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' style='stroke-dasharray: 3%2c 3%3b fill: none%3b'/%3e%3cline x1='386' y1='530' x2='386' y2='530' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='386' y='534' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e6%3c/text%3e%3ctext x='229' y='733' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e7%99%bc%e5%b0%84%e6%b3%a2%e5%bd%a2 (%e9%a0%bb%e7%8e%87 fN)%3c/text%3e%3cline x1='82' y1='762' x2='382' y2='762' class='messageLine0' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' style='fill: none%3b'/%3e%3cline x1='75' y1='762' x2='75' y2='762' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='75' y='766' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e7%3c/text%3e%3ctext x='387' y='777' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e7%b2%be%e7%a2%ba%e8%bf%bd%e8%b9%a4%e9%80%99%e5%80%8b%e6%b3%a2%3c/text%3e%3cpath d='M 387%2c806 C 447%2c796 447%2c836 387%2c826' class='messageLine1' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' x1='393' style='stroke-dasharray: 3%2c 3%3b fill: none%3b'/%3e%3cline x1='386' y1='806' x2='386' y2='806' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='386' y='810' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e8%3c/text%3e%3ctext x='232' y='851' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e5%9b%9e%e5%82%b3%e7%9b%b8%e5%90%8c%e7%9a%84%e6%b3%a2 (%e9%a0%bb%e7%8e%87 fN)%3c/text%3e%3cline x1='391' y1='880' x2='79' y2='880' class='messageLine1' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' style='stroke-dasharray: 3%2c 3%3b fill: none%3b'/%3e%3cline x1='386' y1='880' x2='386' y2='880' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='386' y='884' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e9%3c/text%3e%3ctext x='76' y='1036' text-anchor='middle' dominant-baseline='middle' alignment-baseline='middle' class='messageText' dy='1em' style='font-family: arial%2c sans-serif%3b font-size: 16px%3b font-weight: 400%3b'%3e%e5%be%97%e5%87%ba%e6%9c%80%e7%b5%82%e8%b7%9d%e9%9b%a2%3c/text%3e%3cpath d='M 76%2c1065 C 136%2c1055 136%2c1095 76%2c1085' class='messageLine0' stroke-width='2' stroke='none' marker-end='url(%23arrowhead)' x1='82' style='fill: none%3b'/%3e%3cline x1='75' y1='1065' x2='75' y2='1065' stroke-width='0' marker-start='url(%23sequencenumber)'/%3e%3ctext x='75' y='1069' font-family='sans-serif' font-size='12px' text-anchor='middle' class='sequenceNumber'%3e10%3c/text%3e%3c/svg%3e)
結語:技術的車輪滾滾向前
在這篇文章中,俺們分別探討了 AirTag 和藍牙 6.0 中的無線測距的原理。AirTag 使用 UWB 信號,直接測量脈衝的飛行時間來計算距離;而藍牙 6.0 由於信號帶寬太窄,無法產生用來測距的脈衝,因而採用了通過測量相位差來間接求解距離的方法。無論是哪種方法,文中提到的數學原理只是冰山一角,而要讓整個系統跑起來,通信協議、安全和加密、硬件校準和抗干擾等方面的考慮也是必不可少的。
基於相位的測距 (PBR) 的思想最早源於上個世紀,彼時的戰爭年代推動了包括 PBR 在內的雷達科技的極大進步。然而,把 PBR 塞進個人電子產品的想法應該是本世紀才出現的。藍牙作爲一種被廣泛使用的硬件標準,爲 PBR 提供了實踐的舞臺;而藍牙自己也在渴求着進行無線測距的能力,他們就這麼雙向奔赴了。我覺得,這篇 2019 年的論文『👉🏻A high-accuracy phase-based ranging solution with Bluetooth Low Energy (BLE)』應該是第一個把 PBR 塞進藍牙的嘗試。
截至我在寫這篇文章的時候,AirTag 已經出了第二代,市場上也出現了一些搭載藍牙 6.0 的手機和筆電,但是我卻沒有找到利用藍牙 6.0 進行測距的追蹤器硬件或者 APP。即使藍牙 6.0 不需要額外硬件,讓那些奸詐狡猾的安卓廠商升級現有硬件也是需要一些時間的。讓我們靜觀其變,我預測國內安卓廠商開始對這項技術進行自吹自擂的場景,應該會發生在今年下半年……😇
技術的車輪確實在滾滾向前,只不過,一項技術從紙上的數學公式到最終成爲產品,需要幾年甚至幾十年的時間。UWB 如此,PBR 如此,就連 FFT 在無孔不入地滲透到人類生活之前,都經歷了半個多世紀的發展。下一次,當我們再看到一些習以爲常的科技產品時,不要忘記「讓數學公式成爲現實」的工程學精神和一代代工程師們的不懈努力。
 請停用 Dark Reader
請停用 Dark Reader
評論區
妳的評論和建議是我前進的動力!
我很需要妳的評論!無論長短還是水,我都會非常高興 😘